ABOUT

2024.10 - Current
Application Software Engineer
Selected customer projects:
2024.04 - 2024.09
Computer Vision Engineer
2023.03 - 2023.09
Robotics Intern
2022.11 - 2023.02
Research Intern
Mentor: Dr. Teppei Suzuki.
2022 - 2024
Research Assistant
Advisor: Prof. Ikuro Sato, Prof. Rei Kawakami
2019.09 - 2022.10
Research Assistant
See more in Publications and Projects.
Advisor: Prof. Chu-Song Chen, Prof. Yi-Ping Hung.
Spring 2021 & Spring 2022
Teaching Assistant
M.S., Department of Computer Science
Advisor: Prof. Ikuro Sato, Rei Kawakami
B.S. in Engineering, Department of Mechanical Engineering
Research Advisor: Prof. Yi-Ping Hung.
Advanced Humanity and English Language Programme
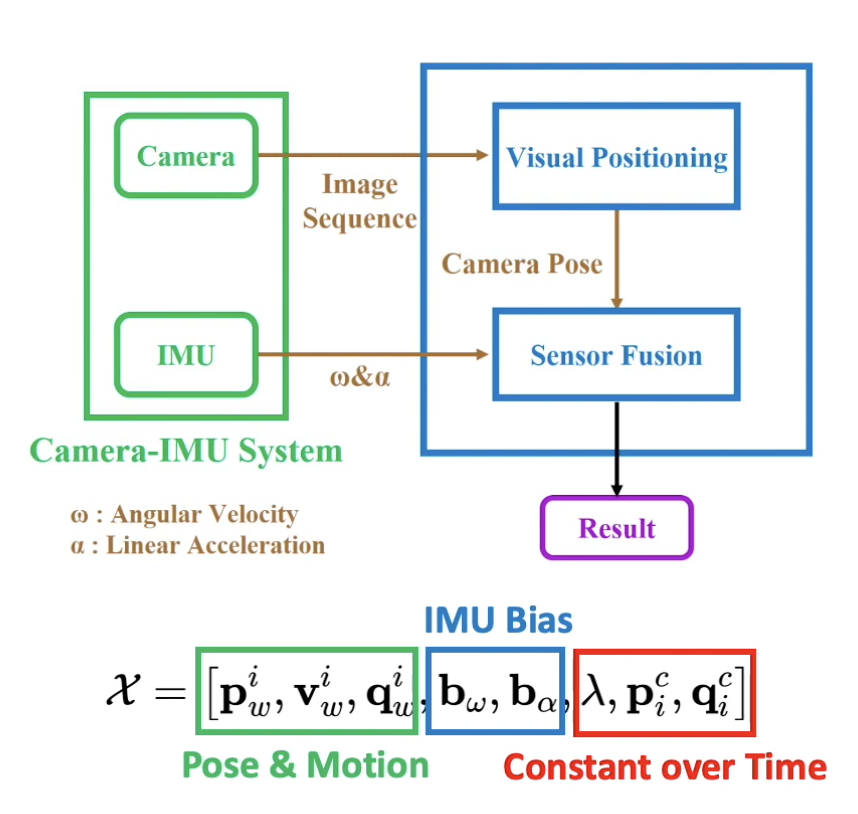
Dense depth and pose estimation is a vital prerequisite for various video applications. We present GCVD, a globally consistent method for learning-based video structure from motion (SfM) in this paper. It improves the robustness of learning-based methods with flow-guided keyframes and well-established depth prior.